News
The next iteration of the class will be offered in the winter semester 2024/25 as a practical course (Master Praktikum).
Registration
If you are eligible to enroll, please click the button below. If the link does not work for you, please go to HISinOne and sign up for the course: "FreiCar: Practical Autonomous Driving" (11LE13P-7302d).
Schedule
This class provides hands-on experience with autonomous driving using a simulated and a corresponding
real-world mobile robotics platform. The platform is based on a 1:8 scale RC car that is equipped with
multiple sensors and on-board compute units. In small groups of students, you will implement several
building blocks of the typical pipeline of self-driving cars, including object perception, mapping,
planning with a given HD map, and control.
To participate, you are required to have some prior knowledge in the field of robotics, e.g., through the
class "Introduction to Mobile Robotics" or other projects. To solve the assignments and the final project,
you should be familiar with both Python and C++. We will give a brief introduction to ROS, but prior
experience will definitely help you.
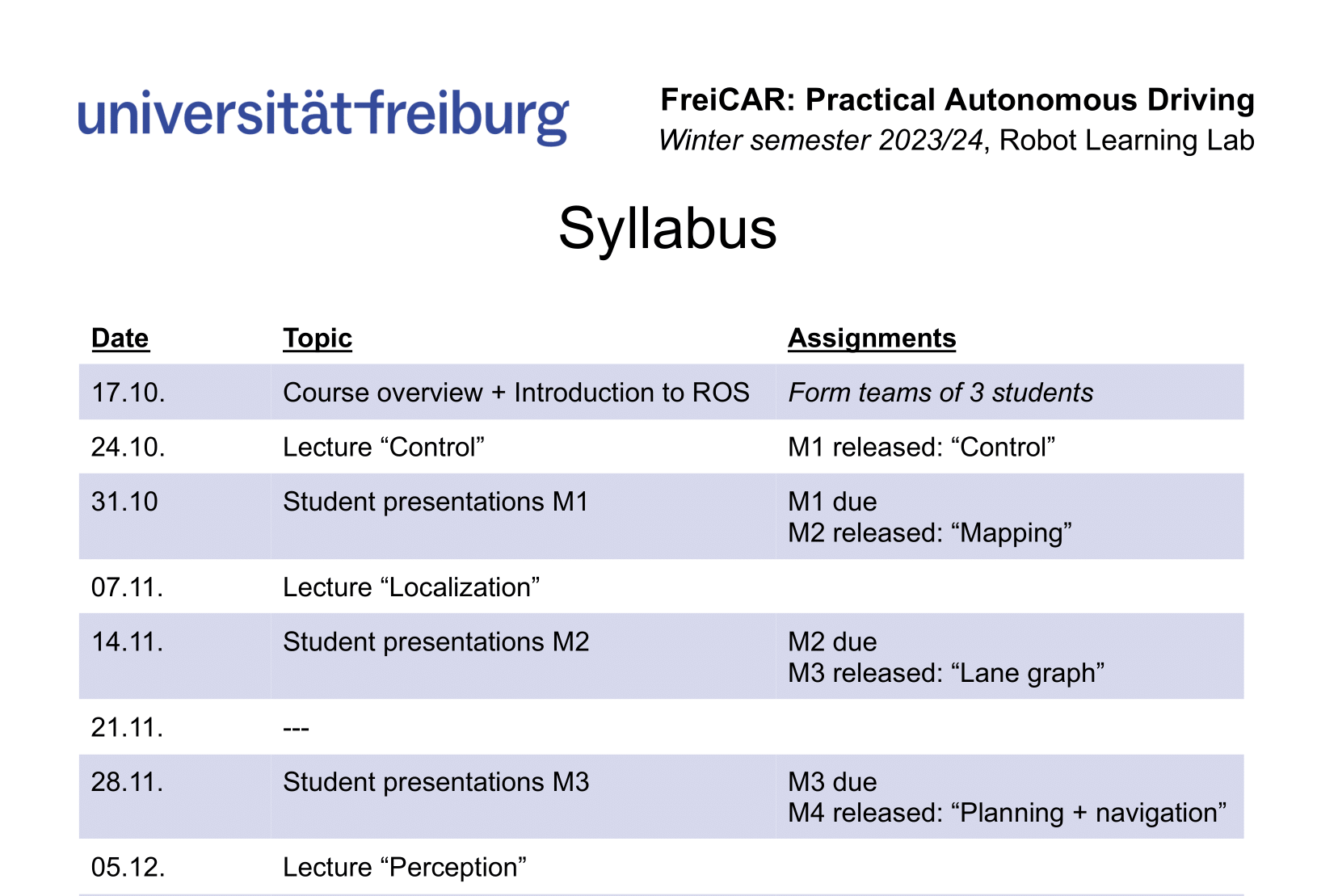
The class will comprise four milestones and a final competition with multiple challenges:
- Milestone 1: Implement a simple controller to steer and accelerate/brake the car (in simulation).
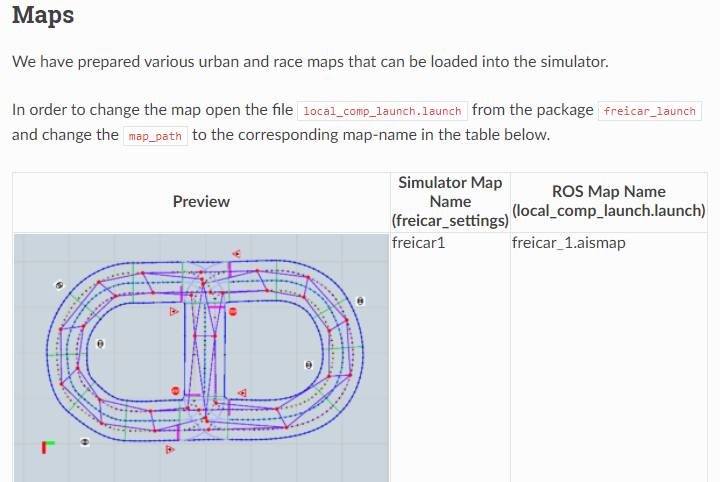
- Milestone 2: Build a digital HD map from a real-world track.
- Milestone 3: Extend this map by high-level topological information using a lane graph.
- Milestone 4: Use your RC car to navigate autonomously between two points on the map leveraging your results of M1 - M3.
- Competition: There will be several challenges covering tasks such as traffic sign detection, multi-agent scenarios, parking, etc.
The detailed syllabus can be found here.
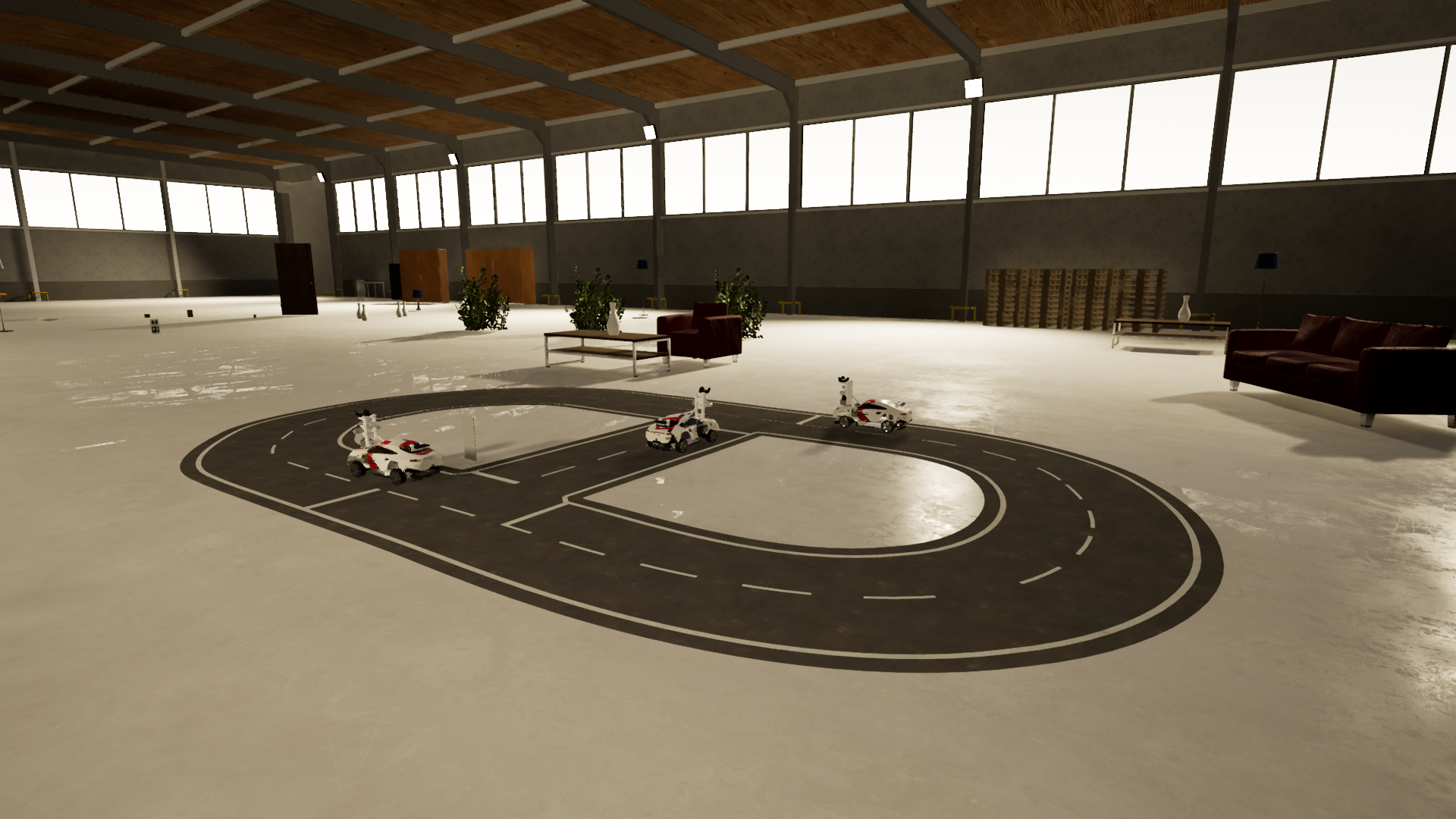
The Simulator
We developed a custom simulator for FreiCAR, based on the Unreal Simulator and CARLA.
We will provide local workstations to run the simulator and solve the coding assignments.